In rasterized rendering, one of the primary tools we have at our disposal is textures.
We use textures to store things like normal maps, roughness maps, pre-integrated lighting, and more.
We can even abuse the texture interpolator to evaluate arbitrary polynomials when the texture contains coefficients from the Bernstein Basis form of the polynomial (https://blog.demofox.org/2016/02/22/gpu-texture-sampler-bezier-curve-evaluation/).
In raytracing, we do still have the ability to use textures, and we will surely use them in fun new ways with the directx ray tracing support that was recently announced, but raytracing also gives us a different kind of tool: queryable geometry that doesn’t necessarily have to have any correlation to what actually shows up on screen.
This can be used for obvious things like soft shadows, reflections, volumetric lights, rendering non triangle based geometry (when doing procedural shapes), but it can be used for off label things too, just as we use textures for things other than putting color directly onto triangles.
Lookup Tables
One way I mentioned that textures are (ab)used is for making lookup tables for functions (pre-integrating lighting, the famous PBR split sum texture, etc).
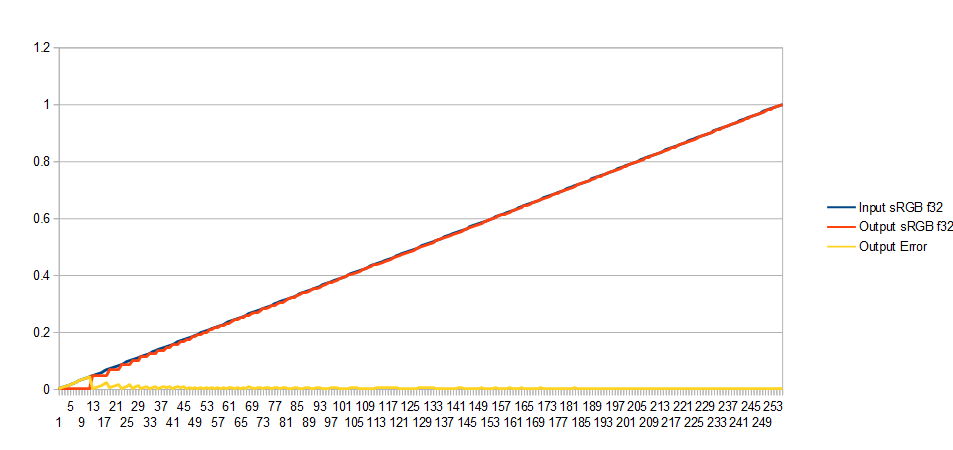
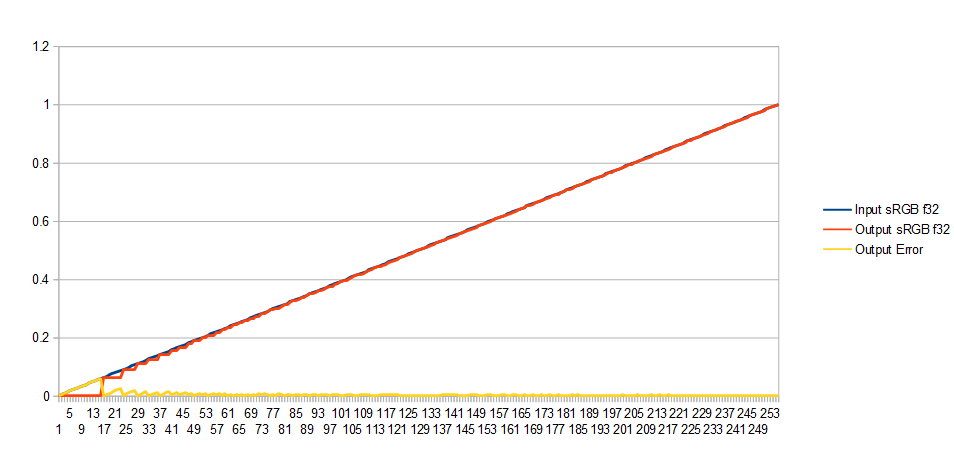
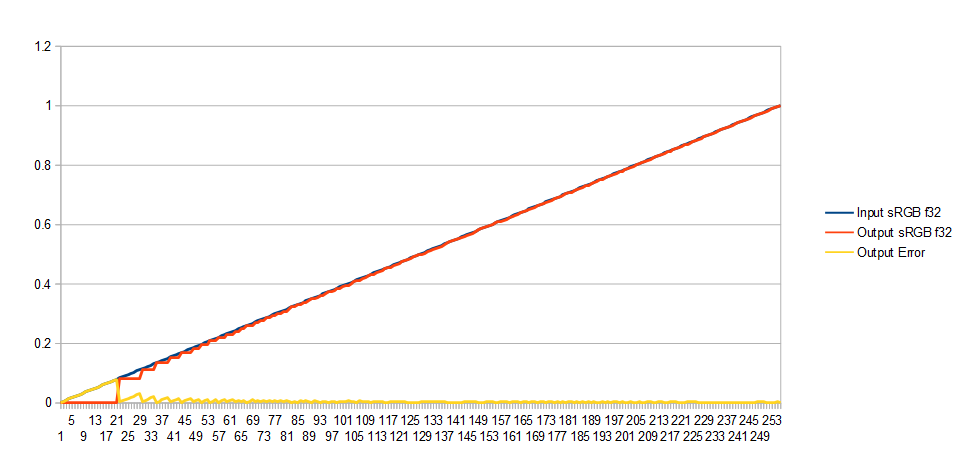
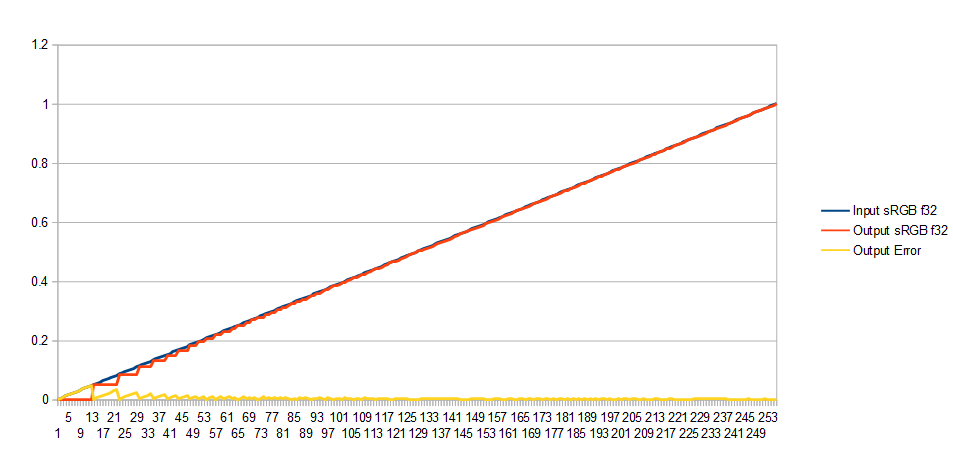
A nice thing about using textures is that bilinear texture sampling is not very expensive on modern hardware compared to point sampling. This means that we can store data at whatever resolution we are ok with getting linear interpolation between.
GPUs interpolate in fixed point with 8 bits for fractional pixels, so the interpolation does break down at a point, but it is still really nice to get interpolated data values cheaply.
A not so nice thing about using textures for lookup tables is that texture data is stored in a regular grid, so you need to make the texture high enough resolution for the most demanding (high frequency) part of the data, while wasting higher resolution on the parts of your data that don’t need it.
Imagine that you have some function z=f(x,y) that you are trying to make a lookup table for. Let’s say that this data is nearly linear in almost all the places you care about, but that there is a very important, smaller section that has a curved part, where getting the curve right is very important to your results.
You’d have to use a high resolution texture to make sure the curved section was well represented, but the other parts would have much higher resolution than needed to represent them which is wasteful to memory and loading time.
(Devil’s advocate: you could address this by warping the uv space!)
Raytracing doesn’t have this problem however because you make a mesh of the function. (Or do you make a mess of the function? Only time will tell I guess!)
In your mesh, the z component of every vertex is the value f(x,y), and it’s up to you which (x,y) values to store. This is in direct contrast to a texture, where the (x,y) values are decided for you and are on a fixed grid.
For the specific function we mentioned, you could use only a few vertices in the places that were linear, and use a lot more vertices in the curved section. How many vertices to use is entirely up to you based on your quality, performance, and memory usage desired.
To actually get a value of this function out for a specific (x,y), assuming the function was always positive, you could cast a ray at the mesh from the position (x,y,0) in the direction (0,0,1). The time t of the ray intersection with the mesh is the value of z at f(x,y).
Something nice here is that you still get linear interpolation, like in the texture case, since a ray vs triangle test does a linear interpolation between the points on the triangle, using barycentric coordinates.
Something else nice is that when you get your intersection information from the ray vs triangle test, you will likely have access to the barycentric coordinates of the intersection, as well as per vertex data. This means that you could store other information per vertex and get a linearly interpolated result, including the data from other functions with entirely different shapes.
This is one way to get around the fact that a texture lookup can give you multiple values as a result (RGBA), while a raytraced lookup can only give you one (ray intersection time) with a naive implementation.
This also lets you do a SIMD type thing, where if you have N functions you are always going to look up for the same input values (Think: diffuse and specular term of image based lighting), that you can do one raytrace to get the answer for all queries.
The “single value result” where you get only a time t ought to be more performant than the multiple value result where you (manually) interpolate vertex data, but as vertex data interpolation is the common case for using the raytracing API, i wouldn’t expect it to be unusably slow for a reasonable amount of data.
To make things really clear and explicit, you could literally replace a cubemap texture lookup with a raytrace into a scene instead, using the same direction vector (of course!). The time down the ray that the intersection happens would be the value of your cube map lookup in that direction. Since that’s only a single value, you could encode more values per triangle vertex and use the barycentric triangle interpolation to get the other values as well. This all works exactly like a texture lookup works, except you get to define your data set sparse in some areas, and dense in others. You are suddenly in control of your data sampling across the entire domain of your data!
When Should We Actually Do This?
So I don’t actually know how the performance of something like this would be on modern video cards – let alone future ones that are more geared to raytracing.
Experiments should be done to see if it can ever be faster than textures, use less memory than textures, or give higher quality than textures, and by how much under what circumstances.
How I’ve laid this out is just one of many ways to make a ray based lookup table, each with their own pros and cons.
For instance, if you have some hemispherical function z=f(x,y) where x and y are azimuth and altitude, the linear interpolation offered by this setup won’t be that great because the function is laid out like a heightfield, when the data really is hemispherical in nature.
If you instead changed the geometry to literally be a hemisphere that has points pushed in and pulled out, and you convert the angular coordinates to cartesian (a normalized direction vector) before the lookup, the linear interpolation offered by the intersection tests is going to be a lot friendlier to your data set.
I also wonder if there are better ray tracing acceleration structures than a generic solve (BVH with surface area heuristic?), when you intend to use the geo as a lookup table. I feel like knowing that the ray will always be vertical from the z=0 plane is important knowledge that could be used to make a better data structure. A grid based solution sure sounds decent (which ironically is how a texture works).
Anyhow, a total random idea I wanted to share.
There’s a forked twitter thread on these ideas and more here:
If you try this and get any details of perf, quality, mem use, etc please share here or hit me up on twitter at https://twitter.com/Atrix256.
Also, any other crazy raytracing ideas, i’d love to hear them (:
 .
.